RSD研究装置和方法之三
结果和讨论--第二阶段
在第二阶段中,我们检查了实际水厂中的7个连续的过滤运行周期。在这些运行中期中,出水的浊度值和颗粒计数数值都是每1分钟记录一次。浊度的测量是使用RT660sc激光浊度仪进行的。与传统的在线浊度仪相比,该仪器显示了更高的灵敏度以及更好的基线稳定性,并且可以测量mNTU的浊度值。
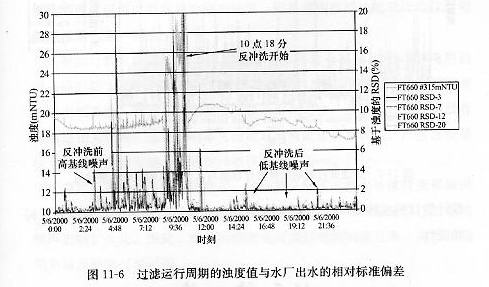
应用在第一阶段的方法也可以应用在第二阶段。在实际水厂的数据中,我们应用了4种RSD运算法则。在完成了这些计算以后,产生了一张图,显示针对所有浊度值的RSD数值的图。图11-6是一个浊度--RSD图形的例子。
在图11-6中,在2000年5月6日的过滤运行周期中又做了一次浊度分析,并且对其基线噪声进行了评估(见图11-6)。左侧的Y轴代表的是浊度值,右侧的Y轴代表的是正果过滤周期运行过程中使用4种不同运算计算得到的RSD数值。在这个运行周期中,反冲洗事件在10:18处开始。随着运行周期接近反冲洗阶段,基线浊度值的噪声越来越大。反冲洗结束以后,基线噪声会恢复正常,并且在数小时内保持相对稳定。RSD数值很好的模拟基线噪声的变化趋势。无论采用哪种RSD运算方法,RSD在反冲洗以前的测量值增加,一般都超过2%。在反冲洗以前,RSD出现显著峰值,表面过滤的性能出现重大的变化。在反冲洗以后,RSD再一次变得很稳定,并且可以保持在2%以下。
总的来说,RSD是用来描述浊度基线噪声的,是有放大作用的。半定量的计算方法,通过几个测量值,把浊度基线噪声放大。
与浊度测量一样,颗粒计数仪的测量值在这7个运行周期中也进行了分析。在图11-7中,对于颗粒计数仪的测量,显示的是同样的过滤周期,颗粒计数的数值显示在左侧的Y轴上,RSD运算法则计算值显示在右侧的Y轴上。
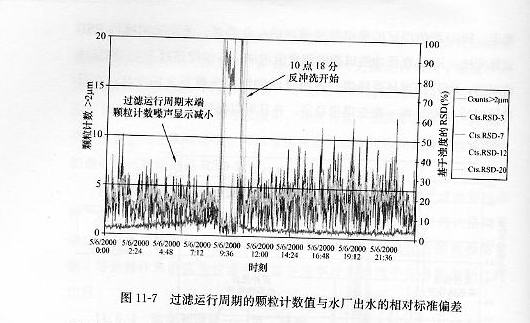
与浊度测量不同的是,在过滤的运行周期中,绝大部分时间里(直到反冲洗前的几分钟),颗粒计数仪的基线(图11-7)是非常稳定的。随着运行周期的法则,很难观察到颗粒计数仪的基线噪声会有所增加。同时,在对颗粒计数数据使用RSD运算法则时,也很难看到基线噪声的增长。4种运算法则的噪声要比FT660sc数据所产生的运算法则的噪声大很多,而且随着运行周期的发展,噪声的幅度并没有增加。颗粒计数仪的基线噪声和RSD运算法则与过滤运行周期的质量没有任何相关性。
《《《 返回关于更多浊度仪知识《《《
本研究中,采用的浊度仪,由著名的浊度仪生产厂家,无锡优量智能仪表提供!

