RSD研究装置和方法之三
结果和讨论--第一阶段
FT660sc数据显示的结果,表示了激光浊度仪可以很容易检测到这些穿透事件。
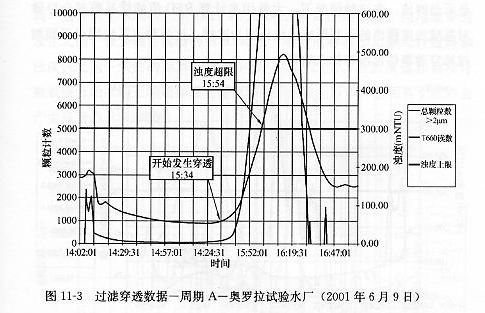
穿透事件A发生的过滤周期如图11-3所以后在那个0分钟的稳定的过滤周期。在15:00处,明矾的供给泵被停止,促使过滤穿透事件的产生。大约在15:34处,颗粒计数器和激光浊度仪都可以观察到穿透事件,并且同时出现了向上的趋势。在15:54处,按照法规设计的浊度0.3NTU已经超出了。超出法规限制的时间将用做过滤穿透事件的参考点。
在图11-3所示的整个过滤运行周期过程中,浊度值和颗粒计数数值的相对标准偏差都进行了计算。相对标准偏差数值是根据一系列给定的测量值进行计算的,这些测量值也可以用来计算平均值和标准偏差值(然后,这些数值可以用来生成相对标准偏差数值)。我们选用了4个测量平均值,分别是3(RSD-3表示),7(RSD-7表示),12(用RSD-12表示)和20(用RSD-20表示)。图11-5显示的是颗粒计数数值。
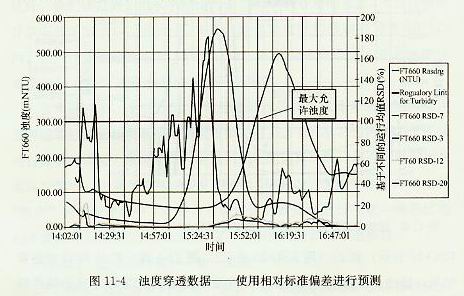
在图11-4中,过滤运行周期中的浊度值显示在左侧的Y轴上,RSD运算法则在右侧的Y轴上。2个显著的RSD峰值,RSD-3和RSD-20,都在穿透事件15:54之前显示。RSD20的峰值是由于熟化阶段浊度值的变化而产生的,如果仅使用这个数据的话,可能会被解释为虚假的正尖峰信号。这种混淆是由于使用大量的样品来计算RSD值引起的。另一方面,RSD3的峰值看起来对实际的过滤穿透事件的指示性更强。RSD-3峰值与浊度的峰值发生了交迭。而且,RSD-3的峰值开始的时间约在明矾泵出现故障后5分钟(15:00处)。RSD-3峰值的大小也表明了基线噪声的显著变化,这也可以反映出由于泵出现故障和样品流的变化。
图11-4所示其他的RSD显示的由于穿透事件所引起的峰值就要小很多。在浊度的峰值开始有向上的趋势前约5分钟,两种运算法则开始显示出峰值,在这种情况下,大量用来计算RSD值的样品数据会导致对基线浊度噪声的不利影响。也正因为这样,这两种运算法则对于预测过滤穿透事件都没有什么效果。
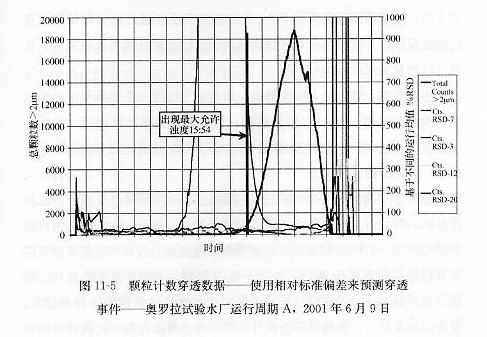
颗粒计数数值和RSD覆盖图如图11-5所示。此处,总的颗粒物个数在左侧的Y轴上表示,RSD数值在右侧的Y轴上表示。在这张图中,仅有一个运算法则,RSD-3,在实际的过滤穿透事件发生以前(在15:58),出现了显著的RSD峰值。RSD-3峰值非常显著,最大值为7802,基线值为18.在明矾出现故障以后的2分钟内,该峰值开始有向上的趋势,它是一种优异的指示器,可以在实际的过滤穿透峰值出现以前发现处理中的意外事件。
来自于RSD-7、RSD-12和RSD-20的颗粒计数器的运算法则也显示在图11-5中。伴随着实际的颗粒计数数值,会观察到微小的增长,但是,这种增长很容易被误认为是基线噪声。
在穿透事件C和D中,我们也观察到了同样的结果。但是,解释他们的RSD峰值非常困难,因为在这2个过滤的运行周期总,稳定状态的时间太短了。稳定状态持续的时间越短,就会导致RSD基线值越高,这样对于RSD-7、rsd-12和RSD-20运算法则而言,在过滤穿透发生之前,很难确定清晰的RSD峰值。唯一能够显示出颗粒计数器和浊度仪之间的一致性的运算法则是RSD-3运算法则。在浊度值和颗粒计数数值开始有向上的趋势表面穿透事件即将发生以前,使用这个法则会产生显著的RSD峰值。
在第一阶段的小结中,试验的数据允许我们应用RSD运算法则应用到模拟的实时应用数据中。但是,由于两个过滤周期中稳定状态持续的时间比较短,因此,只有一个比较合理的应用。过滤的运行周期,A表面过程运算法则可以应用,并且有助于预测穿透事件,而且不会产生虚假的正尖峰峰值。可以应用在激光浊度仪和颗粒计数仪读数中的最好的运算法则是RSD-3.
使用检测出水的两种仪器都可以同时很容易检测到3个过滤穿透事件。适当地设定激光浊度仪的模拟输出信号,充分地利用仪器的检测灵敏度也是非常重要的。最初,没有适当地设定激光卓对于的量程测量值,导致操作人员认为仪器在过滤穿透事件的检测中没有检测到任何信息。
《《《 返回关于更多浊度仪知识《《《
本研究中,采用的浊度仪,由著名的浊度仪生产厂家,无锡优量智能仪表提供!




